| ■パクリまくっています(^ε^) レスキューロボを、作ってみようと思った。 参考にしたユーチューブは、こちら エギング、するのかって? 今はやっていないが、今後、始めるカモ知れないので(^^? まず最初に、エギを掴むフックを6本作った。 硬質ステンレス材、直径1mmを使用
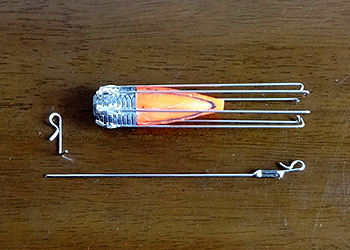
ジェット天秤、20号前後を準備 羽根を削り取った18号の錘があったので、それを使用することにした。 鉛の部分に、ヤスリで6ヵ所、切り込みを入れる。 そこにフックをセットし、耐熱アルミテープで仮止め、ハンダ付けした。 出来上がったのがこちら レスキューロボで、最も手間がかかる工程だ。
その他必要なパーツは、軸と、R形状のラインガイド 根掛かりしたエギのラインを、このRの中に通して落としていく。 R部の隙間は調整が必要だ。 固過ぎてラインが通らないか、緩過ぎてラインが抜ける、どちらかだ(汗)
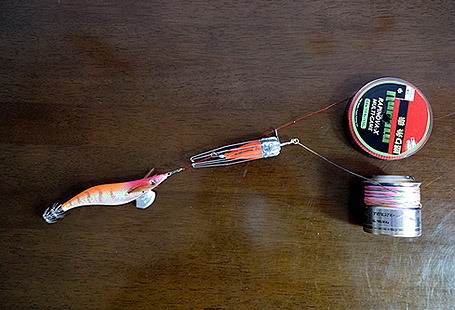
上記部品を組み立てて、完成したのがこちら 強度を上げる為、チャックのハンダ付けを追加 エギの回収を容易にする為、フックを中央辺りで曲げる。 フックの先端が、センターに集まるようにした。
■テスト結果は良好! エギの回収テストを行う。 レスキューロボには、PE6号を結んだ。 このスプールは替えスプールで、普段は遊んでいる。 エギングの時は、荷物になるが、回収用リールを一台持ち歩くことになりそう(--;
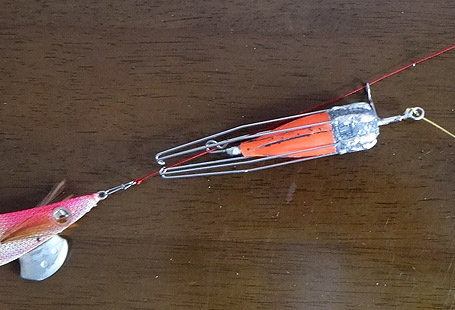
レスキューロボを拡大してみる。 根掛かりしたエギのラインに、レスキューロボをセットすると、写真のようになる。 フックの先端が、エギのラインアイに向かって滑り落ちていく。 下の写真は、ラインの先端にスナップを付けている。
スナップを付けていると、一発でヒットする。 二つのフックに、同時にヒットすることも珍しくない。 スナップが無い時は、何度か繰り返さないと、ヒットしないことが分った。 私は、スナップ派なので、問題ナシ(^^
■考察 実物を見たことはないが、見様見真似で、レスキューロボを作った。 レスキューロボを製作する上で、私が気配りした点を書いておきたい。 一つは、フックの先端形状 一発でキャッチできるかどうかは、これで決まりそうだ。 二つ目は、R形状のラインガイドの位置 二つのガイドとチャックの先端が一直線になるようにした。 三つ目は、フックの接続部の強度 出来るだけハンダ付けの長さを長くし、更に、その上をエポキシ樹脂で覆った。 エギの回収では、問題ないと思っているが… 出来れば、フックの反対側を90度に曲げて、その形状で、力を受けたかった。 レスキューロボを使ってみて、とても完成度が高いと思った。 先人の知恵に感謝! 有難く使わせて頂きますm(_ _)m
|